
Perceptive Locomotion
Terrain-aware Gait Planning for Agile Legged Locomotion

I am computer science Ph.D student at Vanderbilt University that works on optimzation based algorithms for robotic applications. I am interested in researching the field of robotics that involves realtime motion planning. My previous research is in robotic learning and preception from the UT Austin Robot Perception and Learning Lab under Dr. Yuke Zhu. Simultaneously, I have done research on high-performance and parallel computing from the UT Austin Computational Nuclear Engineering research group under Dr. Kevin Clarno.
Feel free to check out all the projects I have been involved in.
Terrain-aware Gait Planning for Agile Legged Locomotion
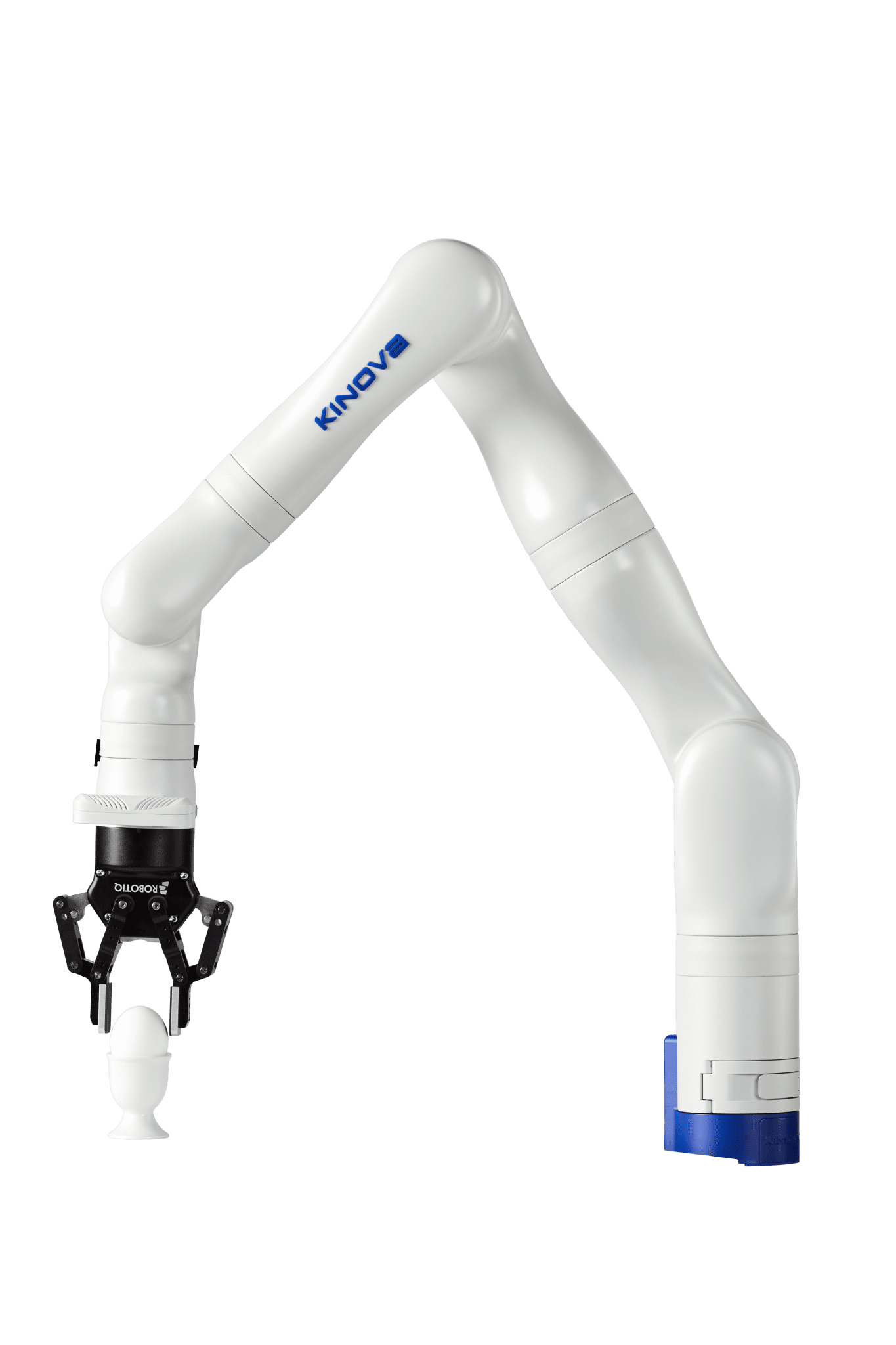
Manipulator Controller Using Operational Space Formulation
Heat Transfer Simulations in Reactor Assembly

Parallel Computing Performance of a Multiphysics Object-Oriented Simulation Environment

3D Printed RC Car Project
Full Stack Website for Customizing Workouts
Realtime Camera Handwritten Number Classifier
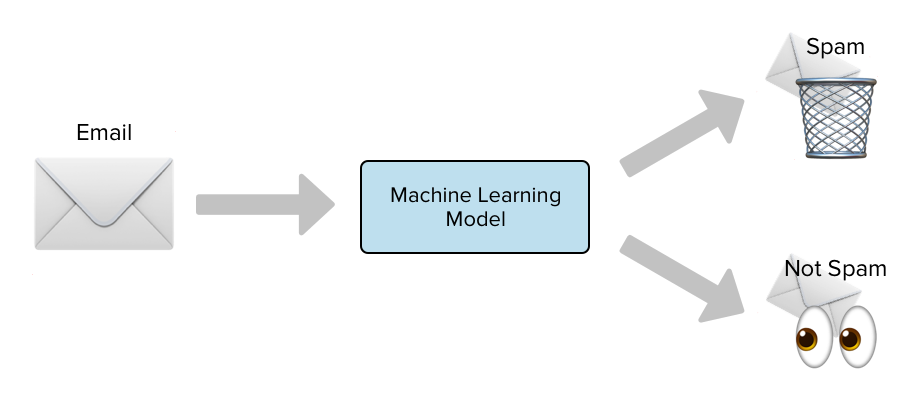
Spam Classification based on Supervised Learning Algorithms